FMCW 光距離計測システムの開発
FMCW 光距離センサとは,光周波数が線形に掃引されたレーザ光を用いた光距離計測システムのことです。このシステムでは光周波数掃引における線形性が距離計測の精度を大きく左右します。そこで,レーザ光の光周波数の非線形性の影響を除去する信号サンプリング法(k サンプリング法)を利用してシステム(下図参照)を構成し,距離計測の空間分解能と高感度化を実現しました。
FMCW 光距離センサでは,光周波数の掃引幅が大きい方が距離分解能と測定精度が向上します。そこで,光周波数の変化幅が大きな面発光レーザ(VCSEL)を光源に用い,距離分解能 460 μm,距離測定精度(標準偏差)350 nm を実現しました。

LiDAR の開発
LiDAR (Light Detection And Ranging) はレーザ光を用いて物体までの距離を測定する光計測技術で,航空機に搭載して地形の形状を測定する測量や,自動運転自動車におけるレーダとして利用されています。通常の LiDAR は光パルスを照射する ToF (Time of Flight) 法を利用していますが,当研究室では FMCW 法を利用した LiDAR の開発を行っています。
干渉型の FMCW LiDAR と非干渉型の FMCW LiDAR の開発を行っています。干渉型 LiDAR では,上述の k サンプリング法や光周波数掃引の線形化技術を利用して,200 m の距離測定に成功しています。測定の高速化,精度向上や長距離測定などを目指して研究しています。


半導体レーザの光周波数掃引の線形化
上記のように,FMCW 光距離センサとでは線形な光周波数掃引が求められます。上記の k サンプリング法は優れた方法ですが,測定距離が長くなると実現が難しくなります。そこで,レーザ光の光周波数を線形掃引するためのレーザ変調波形の最適化を行い,距離計測の空間分解能と高感度化を実現しました。
下の左図は,変調波形の最適化前の距離計測信号(ビートスペクトル)で,右図は変調波形の最適化後の距離計測信号(ビートスペクトル)です。距離計測信号が鋭くなっていますが,これは正確に距離が測定できることを意味しています。


3 次元物体形状計測への応用
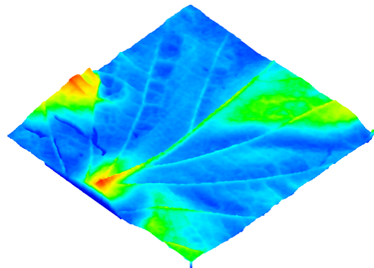
FMCW 光距離センサの応用として,物体形状計測システムの開発を行っています。比較的小型の物体(プリント基板,小型の機械工作物,硬貨など)を対象としています。測定距離は比較的短いので,k サンプリング法を利用したシステムで研究を行っています。具体的には,距離測定用のレーザ光を測定対象上に 2 次元的にスキャンし,測定対象までの距離の空間分布を測定します。
下の写真は,10 円硬貨,500 円硬貨および大葉(青じそ)の測定例です。コインの刻印や模様や,大葉の表面形状も計測できています。


光ファイバグレーティング(FBG)を用いた光ファイバセンサ
FBG とは,光ファイバ内に周期的な屈折率の変調を施した光素子で,屈折率変調の周期で決まる波長(ブラッグ波長)の光のみを反射します。ブラッグ波長は光ファイバの温度やひずみにより変化するので,温度センサやひずみセンサとして利用することができ,多くの研究が行われています。
当研究室は,FMCW 光距離センサと組み合わせた,多点型 FBG 光センサの研究を行っています。すなわち,FBG の位置を FMCW 光距離センサで検出し,温度やひずみをブラッグ波長の変化から測定します。多点型 FBG 光センサでは,通常はブラッグ波長の異なる複数個の FBG を使いますが,光源のスペクトルにより利用できる FBG の数が制限されます。そこで,FMCW 光距離センサと組み合わせることにより,同じブラッグ波長の FBG 光センサを区別して認識できるので,多点化できる FBG 光センサの数の増加が期待されます。
橋,ダムなどの大型構造物の健康診断や破壊予測(structural health monitoring system:SHMS)への応用が期待されます。

その他の研究(過去の研究例)
その他,過去には以下の研究を行いました。機会があれば再開するかもしれません。ご興味をお持ちでしたら,ご連絡いただければ幸いです。
- 半導体レーザの周波数雑音特性・スペクトル線幅測定法の開発
- 半導体レーザの注入同期特性
- 光ファイバセンサとその多重化システムの開発
- 希土類ドープ光ファイバや光ファイバ中の誘導ブリルアン散乱を用いた光ファイバレーザ
- 有機材料を用いた光導波路・光波回路
- InGaAs を用いた高速 MSM 光検出器
- CMOS プロセスを用いた高速光検出器